遠隔操作ロボットシステム「Aloha」は、ロボットアーム 4台やフレーム等で構成されるシステムです。
手前のアーム (Leader Arms) 2台を両手で操作、奥の2台のアーム (Follower Arms) に操作内容を連動させ、模倣学習のための環境を低コストで実現できます。
Aloha はオープンソースシステムのため、カスタマイズ可能であることが特長です。お客様の研究内容や設置環境に合わせて、弊社技術者がカスタマイズのご提案をすることも可能ですので、ぜひお問い合わせください。
NEW Aloha Mobile についても、対応実績がございます。
使用を開始するにあたっての組み立てや設置につきましても、ご希望の設置場所に伺い、設置のサポートを致します。
また、Aloha の制御 兼、ACT(Action Chunking with Transformers)にて機械学習を想定したPCとセットでご提供することも可能です。お気軽にご相談ください。
テガラ株式会社は、Aloha Kits を 提供する Trossen Robotics 社認定の、Aloha Kits および X-Series Arms の販売代理店です
(Aloha Kits : Aloha Stationary / Aloha Mobile / Aloha Solo)
Distributors | Trossen Robotics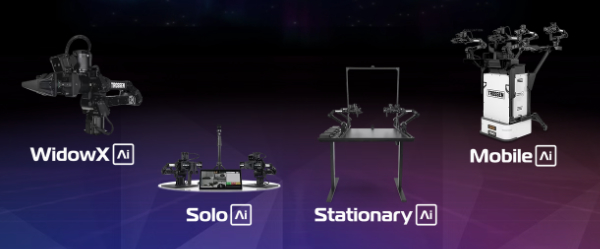
テガラの TKSによる、Aloha Stationary カスタマイズや提供サービスの例
Aloha をお客さまの設置環境や用途に合わせてカスタマイズ
メーカーであるTrossen Robotics社から提供される Aloha Stationary (Aloha Kit) には、アーム本体に加えてアームを固定するためのフレーム等、Aloha を構成する基本的なパーツ一式が含まれています。しかしお客さまの研究テーマや実験の内容、操作する対象物など、個別のニーズや環境によっては、メーカーから提供されたパーツでは要件を満たすことができないケースがあります。
お客さまニーズの一例
- 机のサイズに合わせて固定用フレームのサイズを調整できるようにしたい
- 固定用フレーム上のアーム位置を、ある程度任意に移動できるようにしたい
- 組み立てに時間がかかる
弊社では、このようなお客さまニーズや環境に合わせた問題解決のご相談を承っています。以下に弊社でのカスタマイズ実績例をご紹介いたします。
アーム設置機構のカスタム設計
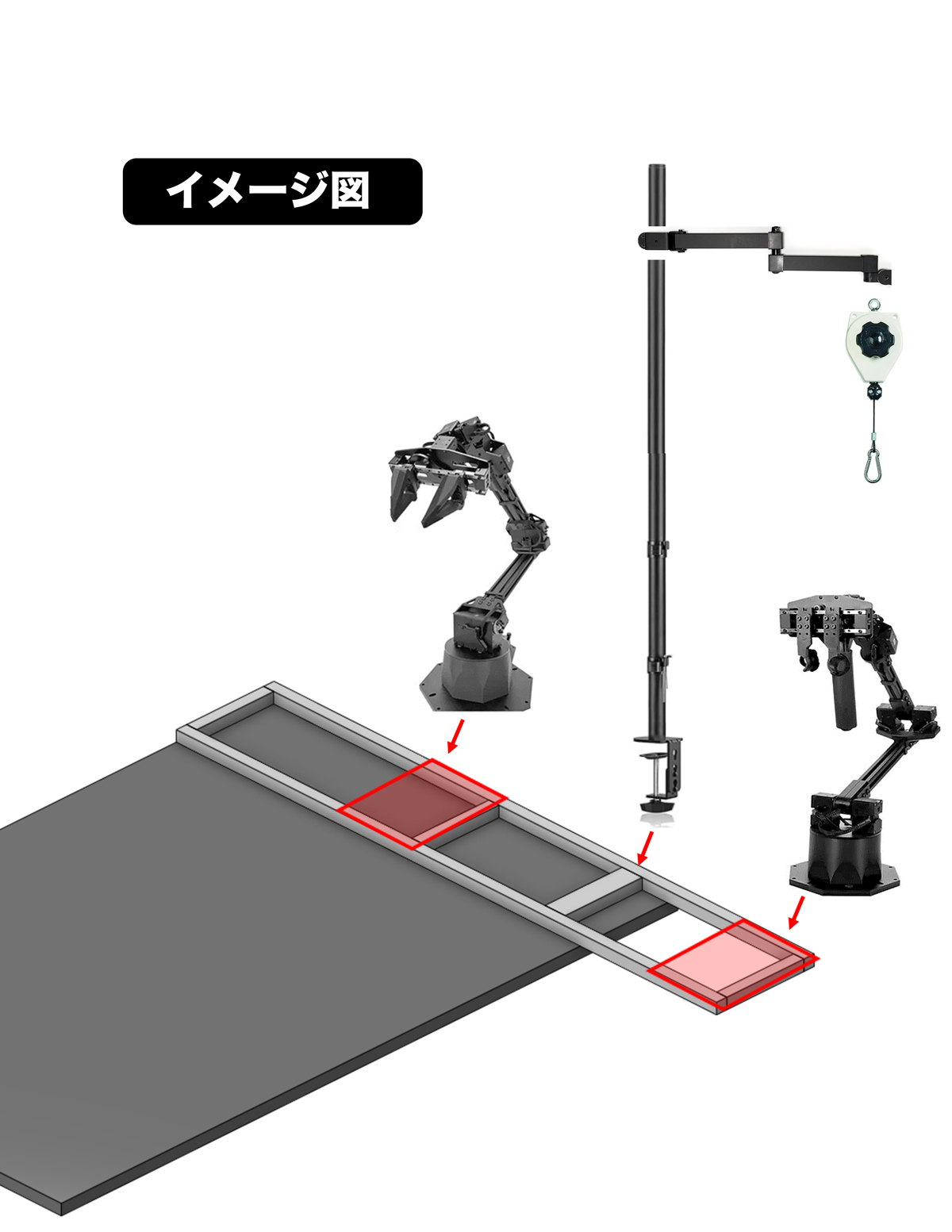

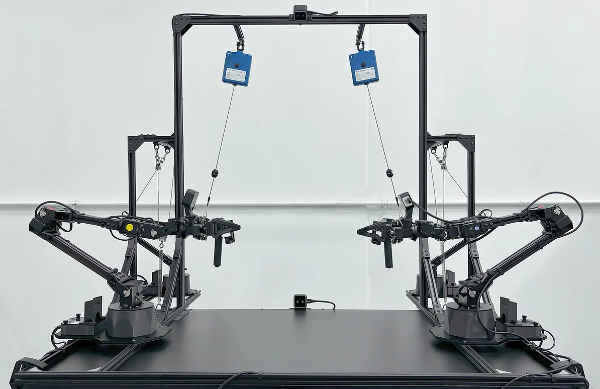
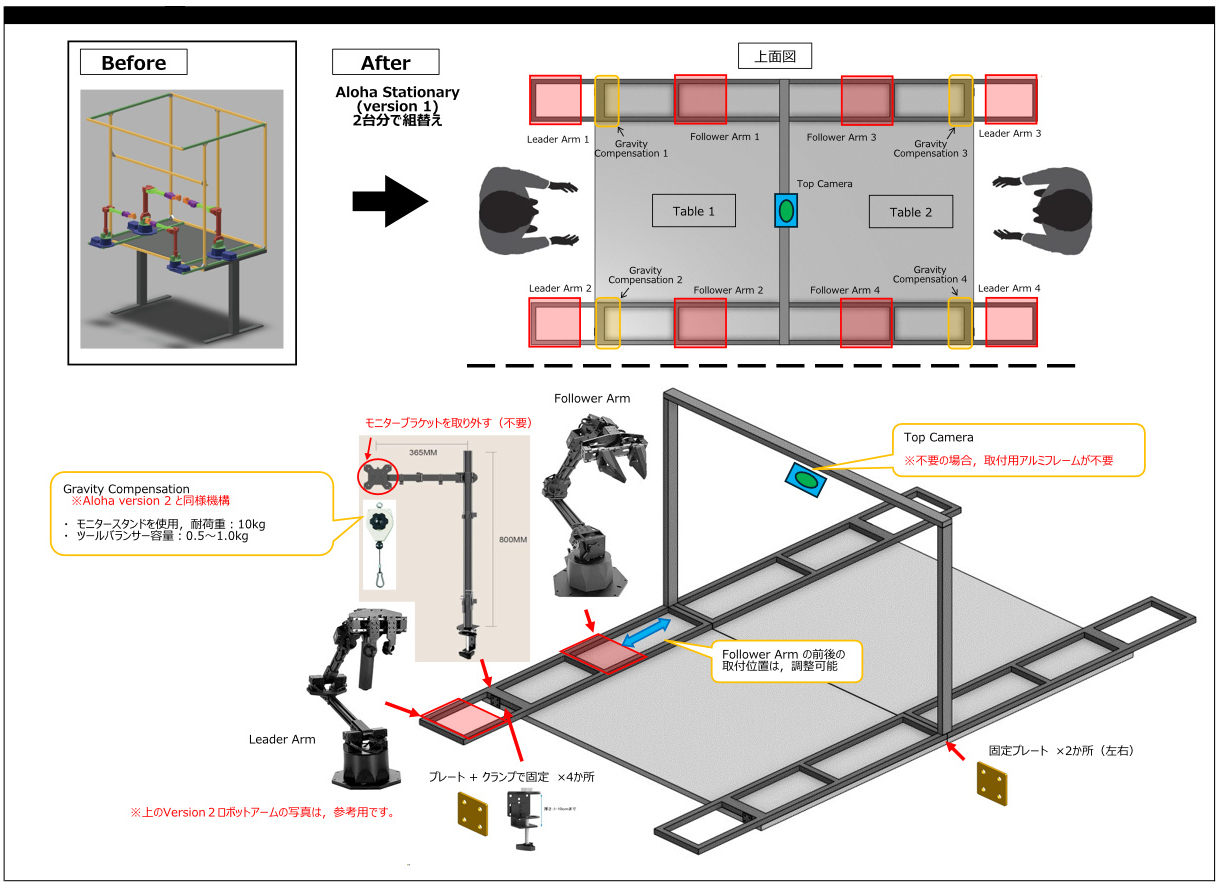
設置の柔軟性を実現するための方法として、片手分の Leader/Follower アームを「1ユニット」とし、これらを机へ固定するためのフレーム、アームを支える支柱 および ツールバランサーで構成されたオリジナルの設置機構を設計しました。アーム取り付け部分のフレームは前後にスライドが可能です。
任意の場所に固定する形態のため設置の自由度が高く、また固定のためのネジ・ボルト類の必要数が減ることで設置も容易になります。
こちらのカスタマイズに関する詳細は以下の記事をご参照ください (バナークリックで 弊社オウンドメディア テガカリへ移動します)
フレームの組み替えカスタム
過去にお客様に納品した Aloha Stationaly ver.1 (旧 ver) について、現地での組み替え作業を実施しました。
具体的には Aloha Stationaly ver.1 で採用されていたフレーム構造を解体し、ver.1 「2台分」の構成パーツを組み替えて、以下の図の様なカスタム構成を構築しました。
こちらのカスタムには前述のアーム設置機構が採用されています。
現地での設置・セットアップ
これまでに複数のお客様のオフィスや研究所に伺い、現地での10台規模の設置・セットアップ実績がございます。
上記カスタム事例で紹介したオリジナルの設置機構の設計をした技術者や、ソフトウェアのエンジニアも弊社に在籍しておりますので、ご希望に応じた柔軟な設置サポートをご提供可能です。
納入前の事前動作テスト
組立・設置後、全体の動作に問題がないか確認するため、Leader/Follower アームの動作テストを実際に行ったうえで納入致します。
Aloha Mobile の輸入、組立、カスタム、納品のサポート

「Aloha Mobile」は、差動駆動型の移動プラットフォームに、4台のロボットアームを搭載した、自律移動型のロボット機械学習キットです。
手前の2台のアーム(Leader Arms)をユーザーが直接操作し、その動きを奥の2台のアーム(Follower Arms)が模倣することで、模倣学習環境を低コストで実現できます。
Aloha Stationary が固定型の機械学習キットであるのに対し、Aloha Mobile は移動機能を備えているため、以下のような多様な範囲での活用が期待されます。
- 自律移動ロボット(AMR) や ヒューマン・ロボット・インタラクション(HRI) の研究
- 物流・倉庫での作業の自動化
- 介護・医療分野でのリモートアシスト
- フィールドロボティクス分野での活用
テガラ株式会社は、Trossen Robotics 社認定の販売代理店として Aloha Mobile (Kit) の輸入はもちろん、構成パーツ一式の組み立て、セットアップ、お客様のご要望に合わせたカスタム、および指定場所への納入、動作テストなどを承ります。お客様のお手元に届いた時点で、すぐに Aloha Mobile を利用できる状態の環境をご用意いたします。
Aloha Mobile 納品までの流れの一例
[1] Aloha Kits のメーカーである Trossen Robotics より、各パーツがバラバラの状態で入荷します
Aloha Mobile は L150×W110×H120 cm ほどの木箱に構成パーツ一式が収まった状態で納品されます。まずはこれらひとつひとつをパーツリストと照らし合わせ、すべてのパーツが揃っているかを検品することから実施します。


[2] 弊社にて ハードウェアの組み立て・配線を行ないます
全てのパーツが揃っていることを確認し、ハードウェアの組み立てを進めます。メインフレームへの電源回りの搭載、アームを取り付けるためのマウンタの取り付け、モバイルベースとの接続、フットペダルの搭載、ロボットアームの搭載、カメラの接続…等を進め、形にしていきます。

過去の組み立て作業においては「メーカーにて組み立てられた状態で納品されていたパーツ (フレーム)にズレが生じておりそのままでは取り付けができない」「パーツ取り付けのためのねじ穴に不具合がある」といった、組み立てに際するトラブルも生じました。弊社にて組み立てを実施することで、弊社技術者がハードウェアに関するこういったトラブルにも対処したうえで、「完成品」を納品することが可能です。
[3] ハードウェアのセットアップ および 動作確認を実施します
組み立てが完了しましたら、Aloha Mobile が問題なく動作するかを弊社内で動作確認いたします (ハードウェア単体としての動作確認)。動作確認の内容としては、各アームの動作確認 (SDK を用いたモーターの認識と動作)、カメラでのデータ画像取得 等になります。
Aloha mobile with Laptop をご購入の場合 :
Aloha Mobile を動かすための PC として、メーカーではGPU 搭載 ラップトップコンピュータ「System76」を推奨品として挙げており、Aloha Mobile と併せてご購入いただくことも可能です (Aloha Mobile with Laptop)。
こちらをご購入いただいた場合は、弊社にて「ソフトウェアセットアップ」「コントローラーのペアリング」も実施いたします。またメーカー公式ドキュメントに沿ったコマンドによる動作確認を実行し、システムとして問題がないことも確認いたします。弊社よりご購入の多くのお客様が with Laptop をお選びいただいております。
オプションの一例 : バックアップ用マシンのセットアップ
開発環境のバックアップとして、納品時と全く同じセットアップを施したマシンをもう一台ご用意するといったことも可能です (この他にもお客様のご要望に応じてオプションをご提示いたします。お気軽にお問い合わせください)。
[4] お客様ご指定の設置環境へお届けいたします
問題なく動作することが確認できましたら、安全に発送ができる単位にまで Aloha Mobile を分解し、丁寧に梱包の上、ご指定の設置環境へお届けいたします。


お客様の元へお届けする際のサイズ感は、JITBOXチャーター便を利用の場合 L104×W104×H170 cm となります。
[5] 弊社技術者がお客様の設置環境へ伺い、開梱、再組立て、動作確認を実施し、納品いたします
後日お届け先に弊社技術者がお伺いし、事前に発送いたしました Aloha Mobile 一式を 開梱の上、改めて組み立てを行います。お客様環境でも動作に問題がないかを再度確認の上、納品完了となります (Aloha Mobile 1台の場合、現地作業の目安は4時間程度となります)。
テガラのサポートパック「あんしん+」 : 導入後のトラブル対応もお任せください
テガラのサポートパック「あんしん+スタンダード」または「あんしん+プレミアム」をご利用いただくことで、メーカー保証に加え、トラブルの初期診断や、修理のための輸送費負担などのアフターサポートをご提供しています。特に「あんしん+プレミアム」では、メーカーの定めた保証期間に加え1年間、製品の不具合等にテガラが対応することが可能です。このような、海外製品を安心してご活用いただくためのサポート体制が、多くの研究者さま・開発者さまにご好評いただいております。
お客様のご要望に応じたカスタマイズや納品までのサービス提供をいたしますので、お気軽にご要望をお知らせください